Kontrol Kandang Marmut.
Marmut adalah hewan peliharaan yang populer karena sifatnya yang ramah dan mudah dirawat. Namun, merawat marmut dengan baik memerlukan perhatian dan waktu yang konsisten, terutama dalam hal pemberian makan, memastikan ketersediaan air bersih, memantau suhu lingkungan, serta memastikan sirkulasi udara yang baik di kandang mereka. Dalam kehidupan sehari-hari yang sibuk, banyak pecinta marmut mungkin kesulitan untuk memberikan perawatan yang optimal kepada hewan peliharaan mereka. Kondisi ini dapat menyebabkan stres bagi pemilik dan dapat berdampak negatif pada kesehatan marmut.
Memperkenalkan solusi inovatif dalam perawatan hewan peliharaan yang memanfaatkan teknologi untuk meningkatkan kualitas hidup hewan dan kemudahan bagi pemiliknya.
Menyediakan solusi praktis bagi pecinta marmut yang dapat mengurangi waktu dan tenaga yang diperlukan untuk merawat marmut serta menyediakan sistem otomatis yang mengatur pemberian makan, pemantauan air, dan kondisi kandang.




2. LCD

 \
\
Spesifikasi :
- Tegangan Operasional: 4.8V hingga 6.0V DC (tergantung model)
- Torsi: Berbeda untuk setiap model, biasanya diukur dalam kg-cm atau oz-in
- Sudut Rotasi: Umumnya 0 hingga 180 derajat, beberapa model dapat berputar 360 derajat atau lebih
- Kecepatan: Waktu yang diperlukan untuk bergerak dari satu posisi ke posisi lain (misalnya, 0.1 detik/60 derajat)
- Kontrol: Sinyal PWM (Pulse Width Modulation)
4. Jumper


Spesifikasi :
- Tegangan Operasional: 3V hingga 12V (tergantung model)
- Arus Operasional: 10mA hingga 30mA
- Frekuensi Suara: 1kHz hingga 5kHz.
Intensitas Suara: Biasanya diukur dalam desibel (dB) pada jarak tertentu.
6. Cooling Fan

Spesifikasi Teknis Cooling Fan 5V :
- Tegangan Operasional: 5V DC
- Arus Operasional: Bervariasi, biasanya sekitar 100mA hingga 200mA
- Kecepatan Putaran: 2000 hingga 5000 RPM (tergantung model)
- Dimensi: Umumnya 40mm x 40mm x 10mm, namun dapat bervariasi
- Konektor: Biasanya memiliki dua atau tiga pin (VCC, GND, dan kontrol kecepatan PWM)

Spesifikasi Teknis Pompa Air DC 3V-5V
- Tegangan Operasional: 3V hingga 5V DC
- Arus Operasional: Bervariasi tergantung beban, biasanya sekitar 100mA hingga 350mA
- Debit Air: Bervariasi, biasanya sekitar 80 hingga 120 liter per jam (L/H)
- Ukuran Pompa: Umumnya kecil dan ringkas, dengan dimensi sekitar 40mm x 20mm x 30mm
- Bahan: Biasanya terbuat dari plastik tahan air
- Konektor: Dua kabel (VCC dan GND)
8. Water Level Sensor

- Arus : < 20mA
- Tegangan max : 2,5 V (saat sensor terbenam air sepenuhnya)
- Output type : Analog
- Ukuran : 120mm x 78mm x 10mm
9. Touch Sensor

Spesifikasi :
- Konsumsi daya yang rendah
- Bisa menerima tegangan dari 2 ~ 5.5V DC
- Dapat menggantikan fungsi saklar tradisional
- Dilengkapi 4 lobang baut untuk memudahkan pemasangan
- Tegangan kerja: 2v s/d 5.5v (optimal 3V)
- Output high VOH: 0.8 VCC (typical)
- Output low VOL: 0.3 VCC (max)
- Arus Output Pin Sink (@ VCC 3V, VOL 0.6V): 8 mA
- Arus Output pin pull-up (@ VCC=3V, VOH=2.4V): 4 mA
- Waktu respon (low power mode): max 220 ms
Waktu respon (touch mode): max 60 ms
Ukuran: 24 mm x 24 mm x 7.2 mm
10. DHT
- Tegangan Operasi: 3V hingga 5.5V DC
- Konsumsi Arus: 0.3 mA (saat pengukuran) hingga 60 µA (saat standby)
- Rentang Pengukuran Suhu: 0°C hingga 50°C dengan akurasi ±2°C
- Rentang Pengukuran Kelembapan: 20% hingga 90% RH dengan akurasi ±5% RH
- Waktu Respon: ≤ 5 detik
- Interval Pengambilan Data: ≥ 1 detik
11. Sensor Infrared

Spesifikasi :
- Tegangan Operasional: 3.3V hingga 5V DC
- Arus Operasional: 10mA hingga 20mA
- Jarak Deteksi: 1mm hingga 25mm
- Panjang Gelombang: 950nm (inframerah)
- Sudut Deteksi: ±15°
- Output: Digital (tinggi/rendah)
- Konektor: 3 pin (VCC, GND, OUT)
- Dimensi: 10.2mm x 5.8mm x 7mm
12. Sensor Load cell

- Tegangan Operasi: 5V DC (umum untuk load cell kecil)
- Rentang Kapasitas: Bervariasi (misalnya, 1kg, 5kg, 10kg, hingga beberapa ton)
- Tegangan Output: 1 mV/V hingga 3 mV/V (bergantung pada beban penuh)
- Non-linearitas: ±0.03% hingga ±0.1% dari kapasitas penuh
- Histeresis: ±0.02% hingga ±0.05% dari kapasitas penuh
- Suhu Operasi: -10°C hingga 40°C (umum untuk load cell kecil)
13. Relay

Spesifikasi :
- Trigger Voltage (Voltage across coil) : 5V DC
- Trigger Current (Nominal current) : 70mA
- Maximum AC load current: 10A @ 250/125V AC
- Maximum DC load current: 10A @ 30/28V DC
- Compact 5-pin configuration with plastic moulding
- Operating time: 10msec Release time: 5msec
- Maximum switching: 300 operating/minute (mechanically)
14. Adaptor

15. Batrai Lithium 3,7 V

- Tegangan Nominal: 3.7V
- Tegangan Pengisian Penuh: Biasanya 4.2V
- Tegangan Minimum (Cutoff): Biasanya sekitar 2.5V hingga 3.0V untuk mencegah kerusakan.
- Kapasitas: Bervariasi, umumnya dinyatakan dalam milliampere-jam (mAh), misalnya 1000mAh, 2000mAh, 3000mAh, atau lebih.
- Kepadatan Energi: Tinggi, umumnya sekitar 150-200 Wh/kg.
- Siklus Hidup: Biasanya 300 hingga 500 siklus pengisian/pengosongan penuh, tetapi dapat mencapai 1000 siklus atau lebih tergantung pada kondisi penggunaan
Berisi teori dari alat dan komponen yang digunakan, disertai dengan grafik respon sensor
1. Arduino Uno
Arduino adalah kit elektronik atau papan rangkaian elektronik open source yang di dalamnya terdapat komponen utama yaitu sebuah chip mikrokontroler dengan jenis AVR dari perusahaan Atmel. Fungsi dari Arduino uni ialah untuk mempercepat dan mempermudah kita dalam pembuatan system control, baik bersifat automasi maupun instrumentasi.
Spesifikasi dari Arduino Uno ialah :
Microcontroller | ATmega328P |
Operating Voltage | 5 V |
Input Voltage (recommended) | 7 – 12 V |
Input Voltage (limit) | 6 – 20 V |
Digital I/O Pins | 14 (of which 6 provide PWM output) |
PWM Digital I/O Pins | 6 |
Analog Input Pins | 6 |
DC Current per I/O Pin | 20 mA |
DC Current for 3.3V Pin | 50 mA |
Flash Memory | 32 KB of which 0.5 KB used by bootloader |
SRAM | 2 KB |
EEPROM | 1 KB |
Clock Speed | 16 MHz |
Komponen Utama Arduino Uno:
1. Papan Mikrokontroler
Arduino menggunakan berbagai jenis papan mikrokontroler, seperti Arduino Uno, Arduino Mega, dan Arduino Nano. Setiap papan memiliki fitur dan spesifikasi yang berbeda sesuai dengan kebutuhan proyek.
2. Power USB
Digunakan untuk menghubungkan Papan Arduino dengan komputer lewat koneksi USB
3. Power Jack
Supply atau sumber listrik untuk Arduino dengan tipe Jack. Input DC 5 - 12 V.
4. Crystal Oscillator
Kristal ini digunakan sebagai layaknya detak jantung pada Arduino. Jumlah cetak menunjukkan 16000 atau 16000 kHz, atau 16 MHz.
5. Reset
Digunakan untuk mengulang program Arduino dari awal atau Reset.
6. Digital Pins I / O
Papan Arduino UNO memiliki 14 Digital Pin. Berfungsi untuk memberikan nilai logika ( 0 atau 1 ). Pin berlabel " ~ " adalah pin-pin PWM ( Pulse Width Modulation ) yang dapat digunakan untuk menghasilkan PWM.
7. Analog Pins
Papan Arduino UNO memiliki 6 pin analog A0 sampai A5. Digunakan untuk membaca sinyal atau sensor analog seperti sensor jarak, suhu dsb, dan mengubahnya menjadi nilai digital.
8. Komunikasi Serial
Arduino mendukung komunikasi serial untuk berinteraksi dengan komputer atau perangkat lain. Komunikasi ini digunakan untuk mengunggah kode dan untuk berkomunikasi dengan perangkat serial lain.
9. LED Power Indicator
Lampu ini akan menyala dan menandakan Papan Arduino mendapatkan supply listrik dengan baik.
Bagian-bagian pendukung dari Arduino:
1. RAM
RAM (Random Access Memory) adalah tempat penyimpanan sementara pada komputer yang isinya dapat diakses dalam waktu yang tetap, tidak memperdulikan letak data tersebut dalam memori atau acak. Secara umum ada 2 jenis RAM yaitu SRAM (Static Random Acces Memory) dan DRAM (Dynamic Random Acces Memory).
2. ROM
ROM (Read-only Memory) adalah perangkat keras pada computer yang dapat menyimpan data secara permanen tanpa harus memperhatikan adanya sumber listrik. ROM terdiri dari Mask ROM, PROM, EPROM, EEPROM.
2. LCD 16x2
LCD 16x2 adalah jenis layar kristal cair (Liquid Crystal Display) yang mampu menampilkan 16 karakter per baris dalam dua baris. Layar ini sering digunakan dalam proyek-proyek elektronik karena mudah diintegrasikan dengan mikrokontroler seperti Arduino, hemat daya, dan cukup ekonomis.
Spesifikasi LCD 16x2:
1. Ukuran: 16 karakter per baris, dua baris.
2. Interface: Paralel (4-bit atau 8-bit mode).
3. Tegangan Operasional: 5V DC.
4. Arus: Sekitar 2mA tanpa backlight, bisa mencapai 15mA dengan backlight.
5. Karakter: Setiap karakter terdiri dari matriks 5x8 piksel.
6. Backlight: Biasanya tersedia dengan LED backlight untuk visibilitas yang lebih baik.
Pinout LCD 16x2
LCD 16x2 biasanya memiliki 16 pin yang digunakan untuk menghubungkan ke mikrokontroler. Berikut adalah penjelasan masing-masing pin:
1. VSS: Ground (0V)
2. VDD: VCC (5V)
3. V0: Kontras (menggunakan potensiometer untuk menyesuaikan kontras layar)
4. RS (Register Select): Pilih antara register perintah dan data
5. RW (Read/Write): Mengatur mode baca atau tulis
6. E (Enable): Mengaktifkan sinyal untuk membaca/tulis data 7-14. D0-D7: Pin data (digunakan dalam mode 8-bit atau sebagian dalam mode 4-bit)
7. A (Anode): Pin positif untuk backlight LED
8. K (Kathode): Pin negatif untuk backlight LED
Bagian-bagian LCD atau Liquid Crystal Display diantaranya adalah:
• Lapisan Terpolarisasi 1 (Polarizing Film 1)
• Elektroda Positif (Positive Electrode)
• Lapisan Kristal Cair (Liquid Cristal Layer)
• Elektroda Negatif (Negative Electrode)
• Lapisan Terpolarisasi 2 (Polarizing film 2)
• Backlight atau Cermin (Backlight or Mirror)
Dibawah ini adalah gambar struktur dasar sebuah LCD:

Struktur LCD
3. Motor Servo
Motor servo adalah aktuator yang digunakan untuk mengontrol posisi sudut atau linear dengan presisi tinggi. Motor servo terdiri dari motor DC, sistem kontrol, dan potensiometer untuk umpan balik posisi. Banyak digunakan dalam aplikasi yang memerlukan kontrol posisi yang akurat, seperti robotika.
Spesifikasi Teknis Motor Servo
1. Tegangan Operasional: 4.8V hingga 6.0V DC (tergantung model)
2. Torsi: Berbeda untuk setiap model, biasanya diukur dalam kg-cm atau oz-in
3. Sudut Rotasi: Umumnya 0 hingga 180 derajat, beberapa model dapat berputar 360 derajat atau lebih
4. Kecepatan: Waktu yang diperlukan untuk bergerak dari satu posisi ke posisi lain (misalnya, 0.1 detik/60 derajat)
5. Kontrol: Sinyal PWM (Pulse Width Modulation)
Prinsip kerja motor servo yaitu motor servo dikendalikan dengan memberikan sinyal modulasi lebar pulsa (Pulse Wide Modulation / PWM) melalui kabel kontrol. Lebar pulsa sinyal kontrol yang diberikan akan menentukan posisi sudut putaran dari poros motor servo. Sebagai contoh, lebar pulsa dengan waktu 1,5 ms (mili detik) akan memutar poros motor servo ke posisi sudut 90⁰. Bila pulsa lebih pendek dari 1,5 ms maka akan berputar ke arah posisi 0⁰ atau ke kiri (berlawanan dengan arah jarum jam), sedangkan bila pulsa yang diberikan lebih lama dari 1,5 ms maka poros motor servo akan berputar ke arah posisi 180⁰ atau ke kanan (searah jarum jam). Lebih jelasnya perhatikan gambar dibawah ini.

Pulse Width Modulation
4. Jumper
Jumper adalah suatu istilah kabel yang ber-diameter kecil yang di dalam dunia elektronika digunakan untuk menghubungkan dua titik atau lebih dan dapat juga untuk menghubungkan 2 komponen elektronika. Jenis-jenis jumper:
1. Male-male
Jenis kabel yang digunakan untuk koneksi male to male pada kedua ujung kabelnya.
2. Male-female
Jenis kabel yang digunakan untuk koneksi male-female dengan salah satu ujung kabel dikoneksikan male dan satu ujungnya lagi dengan koneksi female.
3. Female-female
Jenis kabel yang digunakan untuk koneksi female-female pada kedua ujung kabelnya.
5. Buzzer
Buzzer adalah komponen elektronik yang digunakan untuk menghasilkan suara. Buzzer dapat digunakan untuk memberikan umpan balik suara, peringatan, atau sinyal dalam berbagai aplikasi.
Spesifikasi Teknis Buzzer
1. Tegangan Operasional: 3V hingga 12V (tergantung model)
2. Arus Operasional: 10mA hingga 30mA
3. Frekuensi Suara: 1kHz hingga 5kHz.
4. Intensitas Suara: Biasanya diukur dalam desibel (dB) pada jarak tertentu.
6. Cooling Fan 5V
Cooling Fan 5V adalah kipas pendingin yang beroperasi pada tegangan 5V. Komponen ini sering digunakan dalam sistem elektronik untuk menjaga suhu perangkat tetap stabil dan mencegah overheating.
Spesifikasi Teknis Cooling Fan 5V
1. Tegangan Operasional: 5V DC
2. Arus Operasional: Bervariasi, biasanya sekitar 100mA hingga 200mA
3. Kecepatan Putaran: 2000 hingga 5000 RPM (tergantung model)
4. Dimensi: Umumnya 40mm x 40mm x 10mm, namun dapat bervariasi
5. Konektor: Biasanya memiliki dua atau tiga pin (VCC, GND, dan kontrol kecepatan PWM)
7. Pompa Air DC 3V – 5V
Pompa air DC 3V-5V adalah perangkat elektronik yang digunakan untuk memindahkan atau mengalirkan air dari satu tempat ke tempat lain dengan menggunakan motor DC kecil.
Spesifikasi Teknis Pompa Air DC 3V-5V
1. Tegangan Operasional: 3V hingga 5V DC
2. Arus Operasional: Bervariasi tergantung beban, biasanya sekitar 100mA hingga 350mA
3. Debit Air: Bervariasi, biasanya sekitar 80 hingga 120 liter per jam (L/H)
4. Ukuran Pompa: Umumnya kecil dan ringkas, dengan dimensi sekitar 40mm x 20mm x 30mm
5. Bahan: Biasanya terbuat dari plastik tahan air
6. Konektor: Dua kabel (VCC dan GND)
8. Water Level Sensor
Water level meter controller yang bisa mendeteksi volume air, tinggi air, serta kualitas air di dalam tangki, sungai, danau, dan sejenisnya dengan akurat dan mudah. Karakteristiknya perangkat ini dipakai pada tangki air guna memberitahu suasana air pada tangki dan bakal secara otomatis mematikan ataumengobarkan pompa air andai keadaan air nyaris penuh atau nyaris habis.Dan juga, dipakai sebagai unsur dari sistem peringatan dini (early warning system) pada sebuah danau, sungai, waduk, dan sebagainya.Bagi mendeteksi arus, ketinggian, dan debit air andai mengalamipenambahan ataupun penurunan yang langsung diantarkan ke operator pemantau guna di analisa dan dilaporkan.
Jumlah Pin pada Sensor ini berjumlah 3 Yaitu :
Pin Negatif (-)
Pin Positif (+)
Pin Data (S)
Berikut adalah spesifikasi dari water level :
4. Arus : < 20mA
5. Tegangan max : 2,5 V (saat sensor terbenam air sepenuhnya)
6. Output type : Analog
7. Ukuran : 120mm x 78mm x 10mm
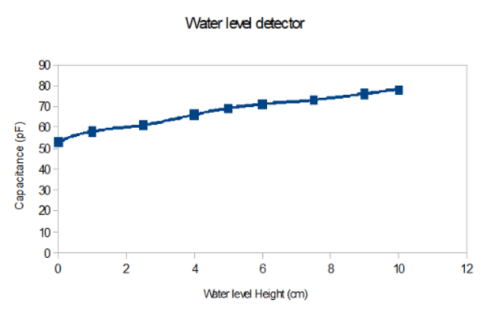
Pengoperasian sensor ketinggian air cukup sederhana. Jejak daya dan indra membentuk resistor variabel (seperti potensiometer) yang resistansinya bervariasi berdasarkan seberapa banyak mereka terpapar air.
Cara Kerja Sensor
Water level merupakan sensor yang berfungsi untuk mendeteksi ketinggian air dengan output analog kemudian diolah menggunakan mikrokontroler. Cara kerja sensor ini adalah pembacaan resistansi yang dihasilkan air yang mengenai garis lempengan pada sensor. Cara kerja sensor ini adalah pembacaan resistansi yang dihasilkan air yang mengenai garis lempengan pada sensor. Semakin banyak air yang mengenai lempengan tersebut, maka nilai resistansinya akan semakin kecil dan sebaliknya. Sensor memiliki sepuluh jejak tembaga yang terbuka, lima di antaranya adalah jejak daya dan lima lainnya adalah jejak indera. Jejak-jejak ini terjalin sehingga ada satu jejak indera di antara setiap dua jejak kekuatan. Biasanya, jejak kekuatan dan indera tidak terhubung, tetapi ketika direndam dalam air, keduanya dijembatani. Pengoperasian sensor ketinggian air cukup sederhana. Jejak daya dan indra membentuk resistor variabel (seperti potensiometer) yang resistansinya bervariasi berdasarkan seberapa banyak mereka terpapar air.
9. Touch Sensor
Digital Touch Sensor inilah salah satu saklar modern. Digital Touch Sensor merupakan sebuah modul sensor yang berfungsi seperti tombol/saklar, namun cara penggunaanya hanya perlu dengan menyentuhnya menggunakan jari kita. Pada saat disentuh oleh jari, sensor akan mendeteksi aliran arus listrik pada tubuh manusia karena tubuh manusia dapat mengalirkan listrik. Data akan berlogika 1 (HIGH) saat disentuh oleh jari dan akan berlogika 0 (LOW) saat tidak disentuh.
Digital touch sensor dapat digunakan untuk switching suatu alat atau sistem. Seperti untuk menghidupkan lampu, menghidupkan motor, menyalakan sistem keamanan, dan lain-lain.

Grafik Respon Sensor Touch
Spesifikasi dari sensor Touch
1. Konsumsi daya yang rendah
2. Bisa menerima tegangan dari 2 ~ 5.5V DC
3. Dapat menggantikan fungsi saklar tradisional
4. Dilengkapi 4 lobang baut untuk memudahkan pemasangan
5. Tegangan kerja: 2v s/d 5.5v (optimal 3V)
6. Output high VOH: 0.8 VCC (typical)
7. Output low VOL: 0.3 VCC (max)
8. Arus Output Pin Sink (@ VCC 3V, VOL 0.6V): 8 mA
9. Arus Output pin pull-up (@ VCC=3V, VOH=2.4V): 4 mA
10. Waktu respon (low power mode): max 220 ms
11. Waktu respon (touch mode): max 60 ms
12. Ukuran: 24 mm x 24 mm x 7.2 mm
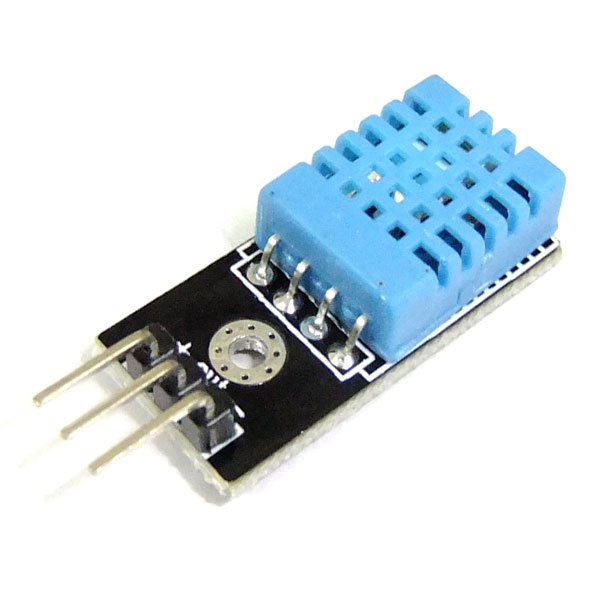
10. Sensor DHT
DHT11 adalah sensor suhu dan kelembaban, yang memiliki keluaran sinyal digital yang dikalibrasi dengan sensor suhu dan kelembaban yang kompleks. Teknologi ini memastikan keandalan tinggi dan sangat baik stabilitasnya dalam jangka panjang. mikrokontroler terhubung pada kinerja tinggi sebesar 8 bit. Sensor ini termasuk elemen resistif dan perangkat pengukur suhu NTC. Keunggulan dari sensor DHT11 dibanding dengan yang lainnya antara lain memiliki kualitas pembacaan data sensing yang sangat baik, responsif (cepat dalam pembacaan kondisi ruangan) serta tidak mudah terinterverensi.
Beberapa karakteristik yang terdapat pada sensor DHT11 antara lain adalah:
1. Tegangan Operasi: 3V hingga 5.5V DC
2. Konsumsi Arus: 0.3 mA (saat pengukuran) hingga 60 µA (saat standby)
3. Rentang Pengukuran Suhu: 0°C hingga 50°C dengan akurasi ±2°C
4. Rentang Pengukuran Kelembapan: 20% hingga 90% RH dengan akurasi ±5% RH
5. Waktu Respon: ≤ 5 detik
6. Interval Pengambilan Data: ≥ 1 detik

Grafik respon dari sensor DHT
11. Sensor Infrared
Infra red (IR) detektor atau sensor infra merah adalah komponen elektronika yang dapat mengidentifikasi cahaya infra merah (infra red, IR). Sensor infrared terdiri dari Led infra red sebagai pemancar(transmitter) dan pada bagian penerima(receiver) terdapat photodioda,phototransistor. Sensor infra merah atau detektor infra merah saat ini ada yang dibuat khusus dalam satu modul dan dinamakan sebagai IR Detector Photomodules. IR Detector Photomodules merupakan sebuah chip detektor inframerah digital yang di dalamnya terdapat fotodiode dan penguat.
Konfigurasi pin infra red (IR) receiver atau penerima infra merah tipe TSOP adalah output (Out), Vs (VCC +5 volt DC), dan Ground (GND). Sensor penerima inframerah TSOP ( TEMIC Semiconductors Optoelectronics Photomodules ) memiliki fitur-fitur utama yaitu fotodiode dan penguat dalam satu chip, keluaran aktif rendah, konsumsi daya rendah, dan mendukung logika TTL dan CMOS. Detektor infra merah atau sensor inframerah jenis TSOP (TEMIC Semiconductors Optoelectronics Photomodules) adalah penerima inframerah yang telah dilengkapi filter frekuensi 30-56 kHz, sehingga penerima langsung mengubah frekuensi tersebut menjadi logika 0 dan 1. Jika detektor inframerah (TSOP) menerima frekuensi carrier tersebut, maka pin keluarannya akan berlogika 0. Sebaliknya, jika tidak menerima frekuensi carrier tersebut, maka keluaran detektor inframerah (TSOP) akan berlogika 1.
Spesifikasi Sensor Reflektif Infrared
1. Tegangan Operasional: 3.3V hingga 5V DC
2. Arus Operasional: 10mA hingga 20mA
3. Jarak Deteksi: 1mm hingga 25mm
4. Panjang Gelombang: 950nm (inframerah)
5. Sudut Deteksi: ±15°
6. Output: Digital (tinggi/rendah)
7. Konektor: 3 pin (VCC, GND, OUT)
8. Dimensi: 10.2mm x 5.8mm x 7mm
Prinsip Kerja Sensor Infrared

Sistem sensor infra merah pada dasarnya menggunakan infra merah sebagai media untuk komunikasi data antara receiver dan transmitter. Ketika IR LED mencarkan radiasi cahaya,radiasi tersebut akan mencapai objek dan beberapa radiasi cahaya akan dipantukan kembali ke Penerima photodiode, Berdasarkan intensitas yang diterima oleh photodiode maka output dari sensor dapat ditentukan.
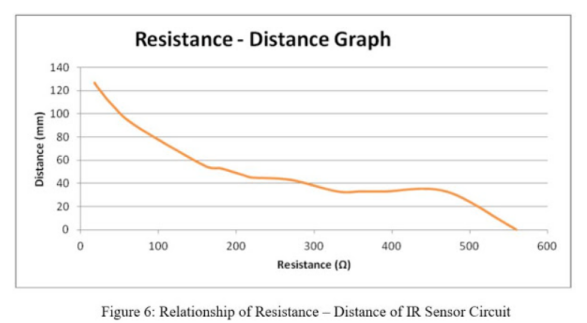
Grafik diatas menunjukkan hubungan anrara resistansi dan jarak untuk sensitivitas antara transmitter dan reciever. Resistor yang digunakan pada sensor mempengaruhi intensitas cahaya inframerah yang keluar dari pemancar. semakin tinggi resistansi yang digunakan, semakin pendek jarak IR reciever yang mampu mendeteksi sinar IR yang dipancarkan IR trasmitter karena intensitas cahaya yang lebih rendah dari IR transmitter.
Komponen Utama Sensor Infrared
1. LED IR (Light Emitting Diode): Memancarkan sinar inframerah.
2. Fotodioda/Fototransistor: Mendeteksi sinar inframerah yang dipantulkan atau terputus.
3. Rangkaian Pemroses Sinyal: Mengubah sinyal dari fotodioda menjadi sinyal yang dapat dibaca oleh mikrokontroler.
12. Sensor Load cell
Sensor load cell merupakan sensor yang dirancang untuk mendeteksi tekanan atau berat sebuah beban, sensor load cell umumnya digunakan sebagai komponen utama pada sistem timbangan digital dan dapat diaplikasikan pada jembatan timbangan yang berfungsi untuk menimbang berat dari truk pengangkut bahan baku, pengukuran yang dilakukan oleh Load Cell menggunakan prinsip tekanan.
Prinsip kerja load cell ketika mendapat tekanan beban.Ketika bagian lain yang lebih elastic mendapat tekanan, maka pada sisi lain akan mengalami perubahan regangan yang sesuai dengan yang dihasilkan oleh strain gauge, hal ini terjadi karena ada gaya yang seakan melawan pada sisi lainnya. Perubahan nilai resistansi yang diakibatkan oleh perubahan gaya diubah menjadi nilai tegangan oleh rangkaian IC HX711. Dan berat dari objek yang diukur dapat diketahui dengan mengukur besarnya nilai tegangan yang timbul.
Beberapa karakteristik yang terdapat pada load cell sensor antara lain adalah:
- Tegangan Operasi: 5V DC (umum untuk load cell kecil)
- Rentang Kapasitas: Bervariasi (misalnya, 1kg, 5kg, 10kg, hingga beberapa ton)
- Tegangan Output: 1 mV/V hingga 3 mV/V (bergantung pada beban penuh)
- Non-linearitas: ±0.03% hingga ±0.1% dari kapasitas penuh
- Histeresis: ±0.02% hingga ±0.05% dari kapasitas penuh
- Suhu Operasi: -10°C hingga 40°C (umum untuk load cell kecil)
Macam-macam loadcell
1. Loadcell Single Point Load cell bench scale. Loadcell ini dipasang pada bagian tengah platform timbangan.
2. Loadcell Shear Beam Load cell ini dipakai untuk floor scale.
3. Loadcell Compress Cara penggunaan Load cell ini adalah dengan menekan bagian atasnya. Biasanya load cell jenis ini di pakai untuk timbangan truck.
4. Loadcell Model S 3 Dinamakan Loadcell S karena bentuknya menyerupai huruf "S". cara kerja dari Load cell ini tidak di tekan melainkan ditarik sisi atas dan bawahnya. Sisi atas dikaitkan dengan gantungan sedangkan bagian bawahnya dikaitkan dengan barang yang akan ditimbang.
5. Loadcell Double Ended Load cell ini bekerja dengan menekan sisi tengahnya. Loadcell ini dipakai untuk timbangan truck.

Grafik Respon Sensor Load Cell
13. Relay
Relay adalah Saklar (Switch) yang dioperasikan secara listrik dan merupakan komponen Electromechanical (Elektromekanikal) yang terdiri dari 2 bagian utama yakni Elektromagnet (Coil) dan Mekanikal (seperangkat Kontak Saklar/Switch). Relay menggunakan Prinsip Elektromagnetik untuk menggerakkan Kontak Saklar sehingga dengan arus listrik yang kecil (low power) dapat menghantarkan listrik yang bertegangan lebih tinggi. Sebagai contoh, dengan Relay yang menggunakan Elektromagnet 5V dan 50 mA mampu menggerakan Armature Relay (yang berfungsi sebagai saklarnya) untuk menghantarkan listrik 220V 2A.
Spesifikasi dari Relay
1. Trigger Voltage (Voltage across coil) : 5V DC
2. Trigger Current (Nominal current) : 70mA
3. Maximum AC load current: 10A @ 250/125V AC
4. Maximum DC load current: 10A @ 30/28V DC
5. Compact 5-pin configuration with plastic moulding
6. Operating time: 10msec Release time: 5msec
7. Maximum switching: 300 operating/minute (mechanically)
14. Adaptor
Adaptor adalah salah satu sumber tegangan DC yang sering jumpai dalam perangkat rumah tangga. Penggunaan adaptor ini diantaranya sebagai pemberi sumber tegangan laptop dan perangkat elektronika yang lain. Adaptor merupakan alat yang berfungsi untuk menurunkan tegangan AC PLN dari 220 volt kemudian mengubahnya menjadi tegangan DC. Oleh karena itu adaptor sering disebut atau dinamakan dengan istilah AC DC Adaptor
Jenis Adaptor yang digunakan pada project demo ini ialah dengan jenis adaptor variable. Adaptor variabel adalah adaptor yang memiliki tegangan output dapat diatur, pada umumnya tegangan output adaptor variabel adalah 1,5 volt, 3 volt, 4,5 volt, 6 volt, 7,5 volt, 9 volt dan 12 volt. Pada adaptor variabel ini dilengkapidengan saklar selektor tegangan yang berfungsi untuk memilih tegangan output yang diinginkan. Saklar selektor dalam adaptor variabel ada yang berbentuk rotari dan berbentuk geser.
Adaptor variabel yang terdapat di pasaran terdapat beberapa ukuran kapasitas arus, dari 500 mA hingga 10 A. Semakin tinggi kapasitas arus yang mampu dihasilkan maka harga adaptor semakin mahal dan sebaliknya semakin kecil kapasitasnya maka harga adaptor semakin murah.
Adaptor variabel adalah adaptor yang didesain multi guna, oleh karena itu adaptor variabel ini dilengkapi dengan saklar selektor untuk menentukan tegangan output, saklar selektor untui mengatur polaritas tegangan pada terminal output dan dilengkapidengan terminal output dengan beberapa model.
15. Batrai Lithium 3,7V
Baterai lithium-ion (Li-ion) adalah jenis baterai isi ulang yang banyak digunakan dalam berbagai perangkat elektronik karena kepadatan energi yang tinggi, ringan, dan masa pakai yang panjang. Salah satu varian yang paling umum adalah baterai dengan tegangan nominal 3.7V, yang biasanya digunakan dalam perangkat portabel seperti ponsel, laptop, dan alat elektronik lainnya.
Spesifikasi Umum Baterai Lithium 3.7V
1. Tegangan Nominal: 3.7V
2. Tegangan Pengisian Penuh: Biasanya 4.2V
3. Tegangan Minimum (Cutoff): Biasanya sekitar 2.5V hingga 3.0V untuk mencegah kerusakan.
4. Kapasitas: Bervariasi, umumnya dinyatakan dalam milliampere-jam (mAh), misalnya 1000mAh, 2000mAh, 3000mAh, atau lebih.
5. Kepadatan Energi: Tinggi, umumnya sekitar 150-200 Wh/kg.
6. Siklus Hidup: Biasanya 300 hingga 500 siklus pengisian/pengosongan penuh, tetapi dapat mencapai 1000 siklus atau lebih tergantung pada kondisi penggunaan.
- Download library yang diperlukan pada bagian download dalam blog.
- Buka proteus yang sudah diinstal untuk membuat rangkaian.
- Tambahkan komponen seperti Arduino, sensor, dan perangkat lainnya lalu susun menjadi rangkaian.
- Buka Arduino IDE yang sudah diinstal.
- Di Arduino IDE, pergi ke menu "File" > "Preferences".Pastikan opsi
- "Show verbose during compile" dicentang untuk mendapatkan informasi detail saat kompilasi.
- Salin kode program Arduino pada blog kemudian tempelkan program tadi ke Arduino IDE.
- Kompilasikan kode dengan menekan tombol "Verify" di Arduino IDE.
- Cari dan salin path file HEX yang dihasilkan selama proses kompilasi.
- Kembali ke Proteus dan pilih Arduino yang telah Anda tambahkan di rangkaian.
- Buka opsi "Program File" dan tempelkan path HEX yang telah Anda salin dari Arduino IDE.
- Jalankan simulasi di Prot


Proyek "Kontrol Kandang Marmut" dirancang untuk membantu pecinta marmut dalam merawat hewan peliharaan mereka dengan lebih efisien dan menghemat waktu. Sistem ini memanfaatkan berbagai sensor dan komponen elektronik untuk memantau kondisi kandang dan memberikan perawatan otomatis. Dengan demikian, pemilik marmut dapat memastikan bahwa hewan peliharaan mereka selalu dalam kondisi terbaik tanpa harus melakukan banyak intervensi manual.
Pada projek tersebut menggunakan komunikas UART yang di sambungkan pada ke dua Arduino yang mana sebagai perangkat mikrokontroller serta menggunakan beberapa alat dan komponen lainnya yaitu sensor touch, sensor water, sensor infrared, sensor load cell, sensor DHT, baterai, motor servo, buzzer.
1. Pemantauan Kecukupan Air dengan water sensor
Water Level Sensor dipasang dalam wadah air marmut untuk mendeteksi tingkat air. Sensor ini mengirimkan data ke mikrokontroler. Jika tingkat air turun di bawah batas yang ditentukan yaitu kecil dari 30, sistem akan mengaktifkan pompa air sebagai pengisian otomatis.
2. Pemberian Makan Otomatis dengan sensor load cell
Load Cell digunakan untuk mengukur berat pakan dalam wadah makanan marmut. Data dari load cell dikirimkan ke mikrokontroler untuk menentukan kapan pakan perlu diisi ulang. Jika berat pakan turun di bawah batas yang ditentukan yaitu 100gr, sistem akan mengaktifkan motor untuk mengisi ulang wadah makanan hingga mencapai berat yang diinginkan.
3. Kontrol Pintu Otomatis menggunakan sensor touch
Touch Sensor dipasang pada pintu kandang untuk mendeteksi sentuhan. Ketika sensor disentuh, sinyal dikirim ke mikrokontroler untuk mengaktifkan motor yang membuka atau menutup pintu kandang.
4. Pemantauan Suhu Kandang
Sensor Suhu ditempatkan di dalam kandang untuk memantau suhu lingkungan. Data suhu dikirim ke mikrokontroler untuk diproses. Jika suhu kandang di luar rentang yang aman yaitu lebih dari 27 oC, sistem dapat mengaktifkan kipas atau Fan.
5. Deteksi Kecukupan Pakan
Sensor Infrared digunakan untuk mendeteksi ketersediaan cadangan pakan di tempat makan marmut. Jika sensor mendeteksi bahwa pakan hampir habis, sinyal dikirim ke mikrokontroler. Mikrokontroler kemudian dapat mengaktifkan dan memberikan peringatan melalui Buzzer.
Proyek "Kontrol Kandang Marmut" memanfaatkan berbagai sensor dan komponen elektronik untuk memantau dan mengelola kondisi kandang marmut secara otomatis. Ini tidak hanya membuat perawatan marmut lebih efisien tetapi juga memastikan marmut mendapatkan perawatan yang optimal dengan sedikit intervensi manual dari pemiliknya. Dengan sistem ini, pemilik marmut dapat lebih mudah memastikan kesejahteraan hewan peliharaan mereka, sehingga memberikan kedamaian pikiran dan kenyamanan dalam perawatan sehari-hari.

SLAVE :


#include <DHT.h>
#include <Wire.h>
#include <LiquidCrystal_I2C.h> //library untuk LCD dengan I2C
#include <SoftwareSerial.h>
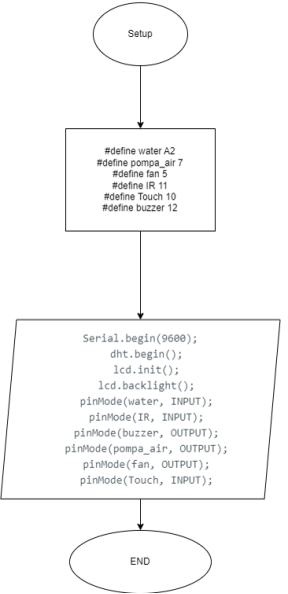
//deklarasi pin
#define water A2
#define pompa_air 7
#define fan 5
#define IR 11
#define Touch 10
#define buzzer 12
LiquidCrystal_I2C lcd(0x27, 16, 2);
DHT dht(4, DHT11); // deklarasi (pin, jenis DHT) pada DHT
void setup() {
Serial.begin(9600);
dht.begin();
lcd.init();
lcd.backlight();
pinMode(water, INPUT);
pinMode(IR, INPUT);
pinMode(buzzer, OUTPUT);
pinMode(pompa_air, OUTPUT);
pinMode(fan, OUTPUT);
pinMode(Touch, INPUT);
}
void loop() {
int sensor_touch = digitalRead(Touch); //membaca nilai sensor touch
int sensor_IR = digitalRead(IR); //membaca nilai sensor infrared
int sensor_water = analogRead(water); // Membaca nilai analog water sensor
float Level = map(sensor_water, 0, 1023, 0, 100); // Konversi nilai water levelsensor ke persentase
float t = dht.readTemperature()-6; // Membaca nilai suhu DHT
//lTampilan Pada LCD
lcd.setCursor(0, 0);
lcd.print("air: ");
lcd.print(Level);
lcd.setCursor(0, 1);
lcd.print("suhu: ");
lcd.print(t);
/* Serial.print("tinggi_Air :");
Serial.println(Level);
Serial.print("IR :");
Serial.println(sensor_IR);
Serial.print("Touch :");
Serial.println(sensor_touch);
Serial.print("suhu :");
Serial.println(t);
*/
//KONDISI SENSOR WATER LEVEL
if (Level < 30) {
digitalWrite(pompa_air, HIGH);
} else {
digitalWrite(pompa_air, LOW);
}
//KONDISI SENSOR DHT
if (t > 27.00) {
digitalWrite(fan, LOW);
} else {
digitalWrite(fan, HIGH);
}
//KONDISI SENSOR TOUCH
if (sensor_touch == HIGH) {
Serial.write('A');
}
else
Serial.write('a');
//KONDISI SENSOR IR
if (sensor_IR == HIGH) {
Serial.write('B');
}
else{
Serial.write('b');
}
delay(500);
}
SLAVE :
//ARDUINO SLAVE
#include <SoftwareSerial.h>
#include <Servo.h> //LIBRARY UNTUK MOTOR SERVO
Servo myServo1; //DEKLARASI NAMA VARIABEL MOTOR SERVO1
Servo myServo2; //DEKLARASI NAMA VARIABEL MOTOR SERVO2
char message;
int pos;
#include <HX711_ADC.h>
#include <LiquidCrystal_I2C.h>
#if defined(ESP8266) || defined(ESP32) || defined(AVR)
#include <EEPROM.h>
#endif
//pins:
const int HX711_dout = 8; //mcu > HX711 dout pin
const int HX711_sck = 9; //mcu > HX711 sck pin
//HX711 constructor:
HX711_ADC LoadCell(HX711_dout, HX711_sck);
const int calVal_eepromAdress = 0;
unsigned long t = 100;
#define buzzer 12
LiquidCrystal_I2C lcd(0x27, 16, 2);
void setup() {
Serial.begin(9600);
delay(10);
lcd.init();
lcd.backlight();
Serial.println();
Serial.println("Starting...");
pinMode(buzzer, OUTPUT);
myServo1.attach(3); //DEKLARASI PIN MOTOR SERVO 1
myServo2.attach(4); //DEKLARASI PIN MOTOR SERVO 2
myServo2.write(0);
LoadCell.begin();
//LoadCell.setReverseOutput(); //uncomment to turn a negative output value to positive
float calibrationValue; // calibration value (see example file "Calibration.ino")
calibrationValue = 696.0; // uncomment this if you want to set the calibration value in the sketch
#if defined(ESP8266) || defined(ESP32)
EEPROM.begin(512); // uncomment this if you use ESP8266/ESP32 and want to fetch the calibration value from eeprom
#endif
EEPROM.get(calVal_eepromAdress, calibrationValue); // uncomment this if you want to fetch the calibration value from eeprom
unsigned long stabilizingtime = 2000; // preciscion right after power-up can be improved by adding a few seconds of stabilizing time
boolean _tare = true; //set this to false if you don't want tare to be performed in the next step
LoadCell.start(stabilizingtime, _tare);
if (LoadCell.getTareTimeoutFlag()) {
Serial.println("Timeout, check MCU>HX711 wiring and pin designations");
while (1)
;
} else {
LoadCell.setCalFactor(calibrationValue); // set calibration value (float)
Serial.println("Startup is complete");
}
}
void loop() {
static boolean newDataReady = 0;
const int serialPrintInterval = 1000; //increase value to slow down serial print activity
while (Serial.available() > 0) {
message = Serial.read();
Serial.println(message);
//MENJALANKAN INSTRUKSI ARDUINO MASTER UNTUK INPUT SENSOR TOUCH
if (message == 'A') {
myServo2.write(0);
delay(20);
}else if (message == 'a')
myServo2.write(180);
//MENJALANKAN INSTRUKSI ARDUINO MASTER UNTUK INPUT SENSOR IR
if (message == 'B') {
digitalWrite(buzzer, LOW);
} else if (message == 'b') {
digitalWrite(buzzer, HIGH);
}
}
// check for new data/start next conversion:
if (LoadCell.update()) newDataReady = true;
// get smoothed value from the dataset:
if (newDataReady) {
if (millis() > t + serialPrintInterval) {
float i = LoadCell.getData();
Serial.print("Load_cell output val: ");
Serial.println(i);
if (i < 100) {
myServo1.write(180);
} else {
myServo1.write(0);
}
newDataReady = 0;
delay(20);
t = millis();
}
}
delay(100);
}
Video Simulasi Proteus :
Download File [KEMBALI]
Download HMTL klik disini
Download listing program klik disini
Download video simulasi rangkaian klik disini
- Download datasheet
